Could make a new topic, but it's only 1 picture. I also have a SPRacingF3, but had problems with it. Everything is fine, until I try to take off. For some reason the quad flips in a rather creepy way, where one of the motors goes full power. I had this happen inside the house, twice. Now reflashed it with latest Betaflight and giving it a last chance in a new build. Third attempt in a total rebuild, only this time different parts then before. So I build this today, only need to add a receiver and it can fly, hopefully it works otherwise I will buy another flightcontroller and ditch this one.
Thanks for the heads up mate, mine was cheap and it is a clone, so I'll keep an eye on that, ta. Let me know if the new setup flies, hopefully was just a bad one, but I know this can put you off.
Cujoway wrote:
sexy
Yes dear?
Ah right, yeh I know thanks Cujo, it is init lol....
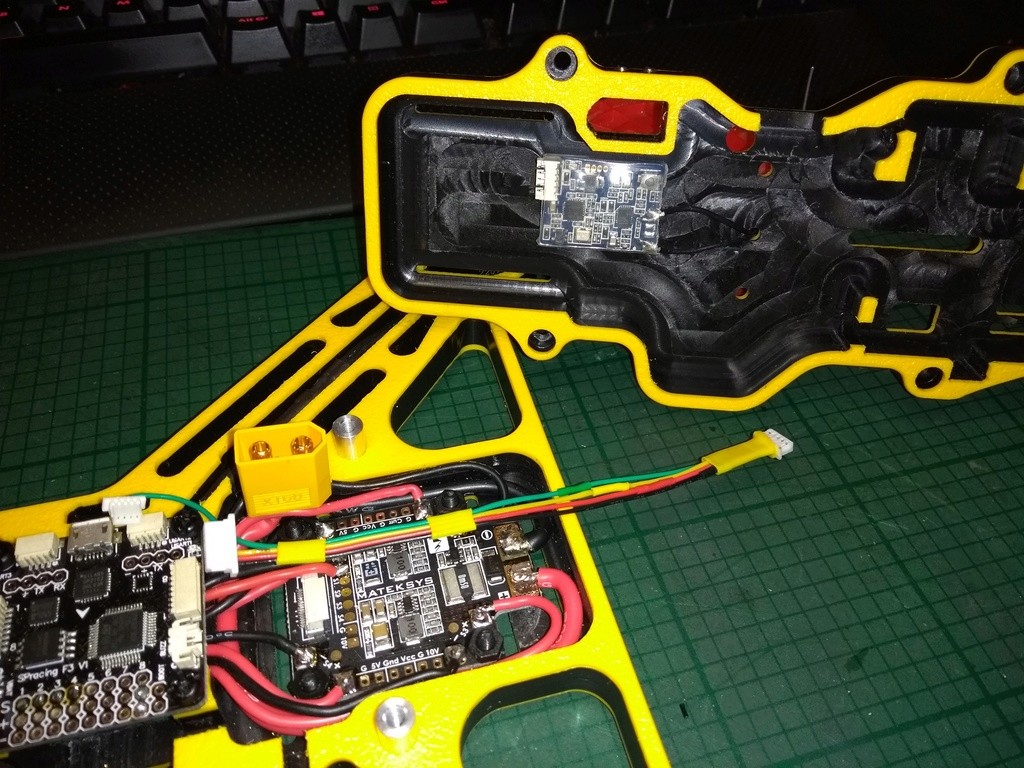
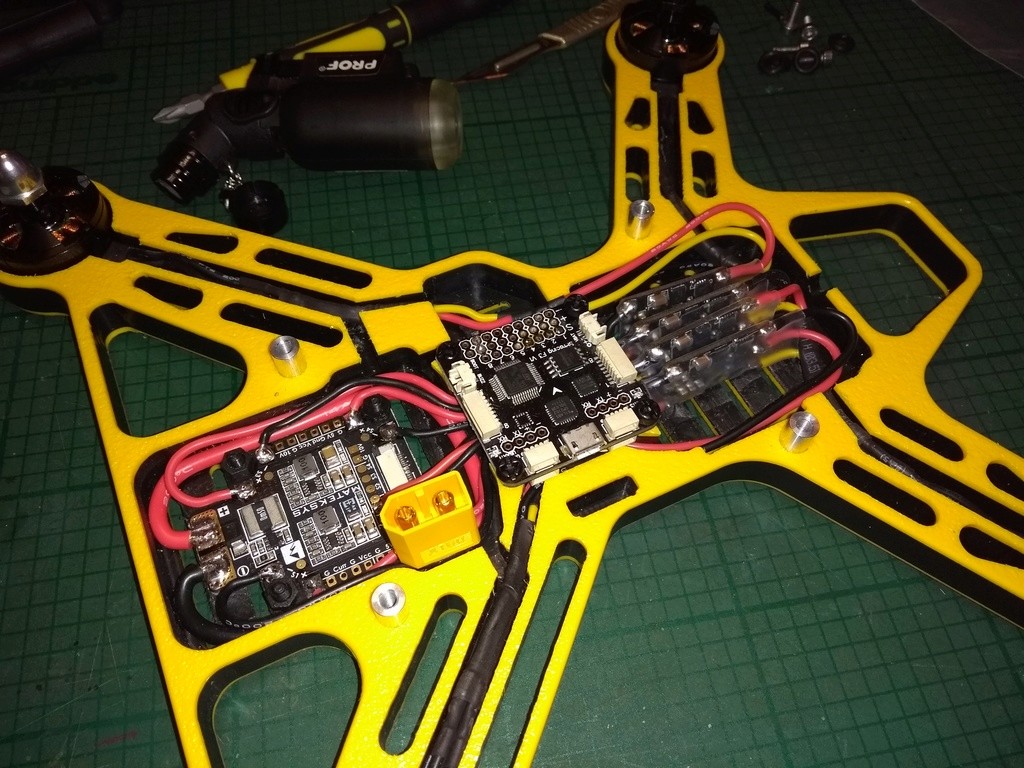
Meanwhile, almost there, this was some fuckery to get wires just right, with enough space to strip them, + slightly shorter than - so the ESCs stand edge on.... They will be shrink wraped, cable tied, then secured to base with 1 more cable tie. Stage 3....
Thanks for the heads up mate, mine was cheap and it is a clone, so I'll keep an eye on that, ta. Let me know if the new setup flies, hopefully was just a bad one, but I know this can put you off.
Not going to be put off by this, will by other one asap if this one does not work. It's not flying yet, got a small problem at the moment. Build is finished, today resoldered to a different PDB, added beeper, and resoldered the signalwires to the FC. One of the solderpads on the FC came loose, but luckily I could remap the motors, so it still is working. Only now the receiver won't bind. Maybe I got it on the wrong UART, it can cause troubles I found out in the past. Otherwise maybe the receiver is LBT, and my Taranis needs other firmware. No more time to try further today, possibly I can fix it tomorrow.
muckyman Admin
Posts : 6470 Join date : 2009-11-14 Age : 59 Location : Hull UK
Not going to be put off by this, will by other one asap if this one does not work. It's not flying yet, got a small problem at the moment. Build is finished, today resoldered to a different PDB, added beeper, and resoldered the signalwires to the FC. One of the solderpads on the FC came loose, but luckily I could remap the motors, so it still is working. Only now the receiver won't bind. Maybe I got it on the wrong UART, it can cause troubles I found out in the past. Otherwise maybe the receiver is LBT, and my Taranis needs other firmware. No more time to try further today, possibly I can fix it tomorrow.
N1, good you traced the wire, but what a PITA. Hmmm, I can see why it's confusing about the UARTs as I've done a fair bit of research on this one. I couldn't find the full documentation for this at all, by full I mean full details & clear details explaining what each port does and when (especially IO1 and IO2, the operation on these ports changes depending what you do) Considering Dominic Clifton designed this and wrote Cleanfight (Mr Cleanflight himself no less!) it should be far better documented. There's no reason why a full datasheet isn't provided for it, which ports go where, what changes when I use Serial PPM/SBUS instead of PWM (parallel). It is explained, but in a very cryptic way in the PDF from the SPF3 website. It's not even writen anywhere that you can even use SBUS on pin 3 of IO1 when it's in serial mode at all. If they were selling it anymore I could understand this, but they sell it on the same website you can get the PDF doc from!!! If this helps, this is how I understand it. Look at the PDF, on page 4 there are tables explaining what each pin does. It seems when it's in parallel or standard old style PCM mode, one wire for each RC channel, then the mode on the left is active, when it's in serial mode or SBUS/PCM then the second option is active on ports 1 and 2!
I've copied this from the PDF on the website, and made it a little clearer. This is IO1: Pin Operation in PCM mode | Operation in SBUS serial mode 1. GND GND 2. VCC VCC 3. CH1 PPM 4. CH2 GPIO 5. CH5 GPIO 6. CH6 GPIO 7. LED_STRIP LED_STRIP 8. 3.3v LED_STRIP
This is IO2: Pin Operation in PCM mode | Operation in SBUS serial mode 1. GND GND 2. VCC VCC 3. CH3 RXD 4. CH4 TXD 5. CH7 SONAR TRIGGER 6. CH8 SONAR ECHO 7. ADC_1 CURRENT METER 8. ADC_2 RSSI
IO2 is doubley confusing because they also use the / symbol to say "ADC1/current meter", but this is what the ADC does and is the same for both serial and parallel modes.
I may have this wrong TBH as I only figured this out yesterday, and I realise you may know this already, but hope it helps.
I got this info a little clearer from the GitHub repository for Cleanflight written by Hydra (Domonic C)... https://github.com/cleanflight/cleanflight/blob/master/docs/Board%20-%20SPRacingF3.md
I also update my Taranis QX7 LBT stuff so it does D8 and D16 etc...
Lots of people calling me sexy this week, feel blessed...
CANNER Moderator
Posts : 7123 Join date : 2013-04-30
Subject: Re: Papa's Quad Build(s). Tue Aug 01, 2017 11:37 am
Thanks for trying to explain, though not sure about using the IO ports for the receiver. Was looking at the UART ports to attach the receiver, but UART1 is default already in use for the USBport.
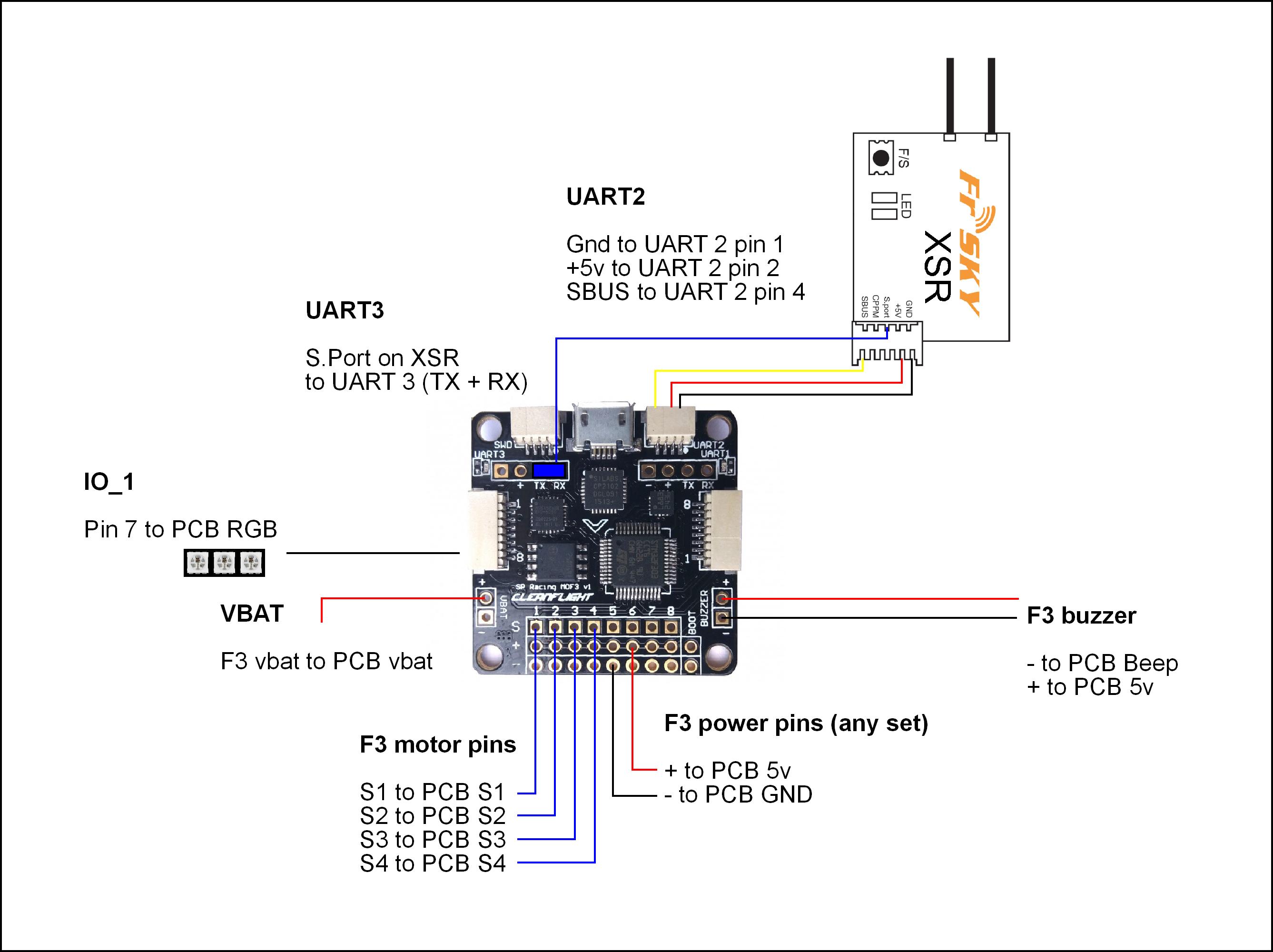
UART1/2/3 Pin Function Notes 1 Ground 2 VCC_IN Voltage as-supplied by BEC. 3 TXD 4 RXD
Have tried 1 and 3, but both no succes. If UART2 fails I could try the IO ports.
This diagram shows SBUS hooked up to UART2, so there's a small chance it will work. Too bad UART2 is plug-only, no solder pads for it.
These XSR receivers have two antennas, so at least some diversity, and like all frsky receivers they have good reliable range. They don't have any standard (pwm) servo outputs so you can only really use them in conjunction with a flight controller of some sort. They work well with mulitrotors. I am using an XJT transmitter module running the EU LBT firmware, so it wouldn't bind to this receiver as shipped. I downloaded the XSR LBT firmware from the frsky site and flashed it onto this receiver and it now works perfectly. You don't need a special interface card to flash the receiver. I did it using my turnigy 9xr pro transmitter. You can search the internet for instructions on how to do this, but it's not difficult.
Fucksake Need to buy a frsky update tool to flash the receiver. tool
Or I can try using the Taranis to flash the receiver, hopefully it works.
Hmmm, bugger, I've never flashed my XSR so I'm not sure as it already came fully EU-LBTd up.
Firstly are you sure your X9D can do all three protocols, D8, D16 and LR12? If not, although I'm sure you know, then do this first, should be selectable.
I updated my QX7 via SD card and using OpenTX companion software 2.2, Blue Falcon did a video on this which I followed.
If you have to flash it, then I'd just make your own patch cable like the video and do it via SD card on Taranis, make sure your batteries are good first though.
If you have to flash it, then I'd just make your own patch cable like the video and do it via SD card on Taranis, make sure your batteries are good first though.
Managed to flash the receiver that way, it works now. In theory the quad is finished, but now there appears to be a small problem. When I arm the quad with the Taranis, the beeper on the FC starts to beep loudly, while the battery is full. Sigh, one step forward, two steps back. At least there is some progress.
muckyman Admin
Posts : 6470 Join date : 2009-11-14 Age : 59 Location : Hull UK
Not going to be put off by this, will by other one asap if this one does not work. It's not flying yet, got a small problem at the moment. Build is finished, today resoldered to a different PDB, added beeper, and resoldered the signalwires to the FC. One of the solderpads on the FC came loose, but luckily I could remap the motors, so it still is working. Only now the receiver won't bind. Maybe I got it on the wrong UART, it can cause troubles I found out in the past. Otherwise maybe the receiver is LBT, and my Taranis needs other firmware. No more time to try further today, possibly I can fix it tomorrow.
N1, good you traced the wire, but what a PITA. Hmmm, I can see why it's confusing about the UARTs as I've done a fair bit of research on this one. I couldn't find the full documentation for this at all, by full I mean full details & clear details explaining what each port does and when (especially IO1 and IO2, the operation on these ports changes depending what you do) Considering Dominic Clifton designed this and wrote Cleanfight (Mr Cleanflight himself no less!) it should be far better documented. There's no reason why a full datasheet isn't provided for it, which ports go where, what changes when I use Serial PPM/SBUS instead of PWM (parallel). It is explained, but in a very cryptic way in the PDF from the SPF3 website. It's not even writen anywhere that you can even use SBUS on pin 3 of IO1 when it's in serial mode at all. If they were selling it anymore I could understand this, but they sell it on the same website you can get the PDF doc from!!! If this helps, this is how I understand it. Look at the PDF, on page 4 there are tables explaining what each pin does. It seems when it's in parallel or standard old style PCM mode, one wire for each RC channel, then the mode on the left is active, when it's in serial mode or SBUS/PCM then the second option is active on ports 1 and 2!
I've copied this from the PDF on the website, and made it a little clearer. This is IO1: Pin Operation in PCM mode | Operation in SBUS serial mode 1. GND GND 2. VCC VCC 3. CH1 PPM 4. CH2 GPIO 5. CH5 GPIO 6. CH6 GPIO 7. LED_STRIP LED_STRIP 8. 3.3v LED_STRIP
This is IO2: Pin Operation in PCM mode | Operation in SBUS serial mode 1. GND GND 2. VCC VCC 3. CH3 RXD 4. CH4 TXD 5. CH7 SONAR TRIGGER 6. CH8 SONAR ECHO 7. ADC_1 CURRENT METER 8. ADC_2 RSSI
IO2 is doubley confusing because they also use the / symbol to say "ADC1/current meter", but this is what the ADC does and is the same for both serial and parallel modes.
I may have this wrong TBH as I only figured this out yesterday, and I realise you may know this already, but hope it helps.
I got this info a little clearer from the GitHub repository for Cleanflight written by Hydra (Domonic C)... https://github.com/cleanflight/cleanflight/blob/master/docs/Board%20-%20SPRacingF3.md
I also update my Taranis QX7 LBT stuff so it does D8 and D16 etc...
My Frsky XSR receiver would not bind on any of the ports of the FC. Turned out I had to update the firmware on the receiver to EU-LBT. After flashing, it finally worked. Now probably it will work on every port I choose, but only tried UART2 so far.
Managed to flash the receiver that way, it works now. In theory the quad is finished, but now there appears to be a small problem. When I arm the quad with the Taranis, the beeper on the FC starts to beep loudly, while the battery is full. Sigh, one step forward, two steps back. At least there is some progress.
Pah, at least the flashing is done, getting closer though I see it as 2 steps closer, 1 step back... Hopefully a simple overlooked setting... In the end if you exhaust all possibilities, you've found out you need a new one, time well spent making sure....
Well, it turned out to be something simple indeed. I had not soldered the vbat to the pdb. Since the flightcontroller is powered with 5v, the vbat registered the battery voltage at max 5v. That caused it to think the battery was empty, so that's why the beeperalarm kept going. Now it is fixed, and I only need to finish off the build so it can fly.
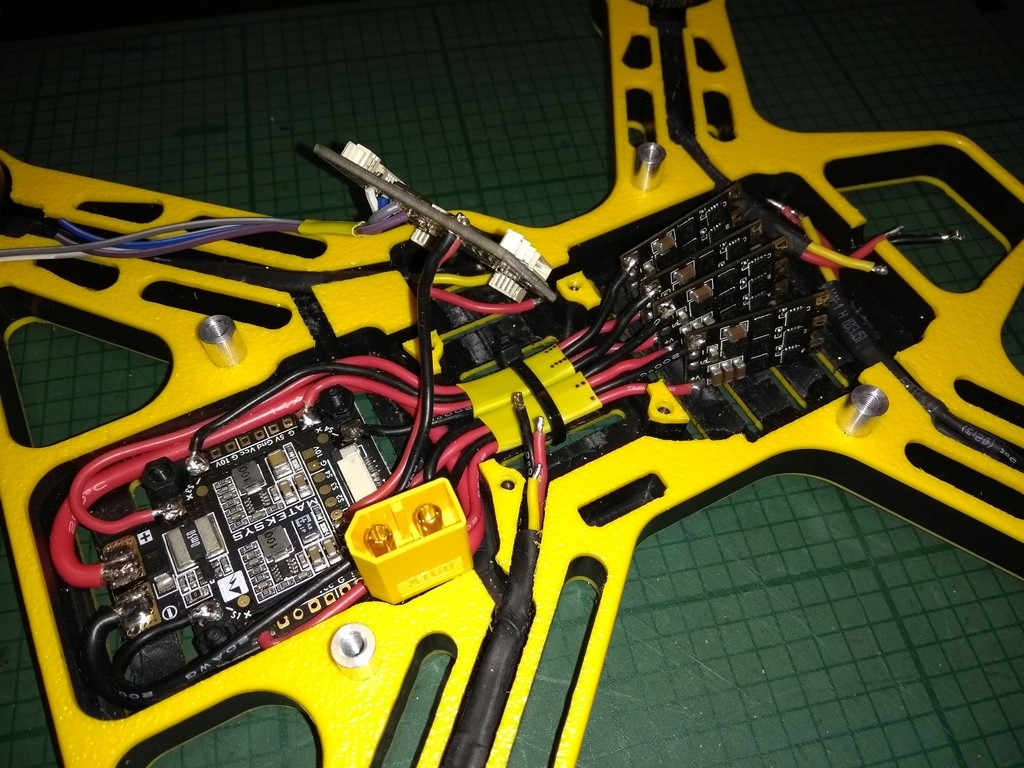
In the meantime I run out of wire on Sunday and couldn't continue or decide the best option for connecting the ESC signals. I wanted to be able to lift the bonnet so to speak ie move the FC to one side if I need to fix something.
So it was either use the right angle connectors and use those little black push on DuPont single pin things, or direct wire which needed to be long enough to able to "lift the bonnet". I didn't want to use the right angle connectors as this looked untidy and wanted to solder as much as possible, but direct wire with thin wires has a tendency to stress where they bend near the solder point and thicker wires won't bend and fold out of way as easily.
Meh, settled with long think direct soldered wires after getting the bits today, I say meh as I still need to stop them stressing, a blob of Hot Glue mat suffice but this is messy. I know this will cause a break eventually but shouldn't as it's all enclosed, took me ages to decide this one thing lol. Should be fine though as it's all enclosed and so nothing should stress much even during a crash. What a lot o faff, worth it though, hopefully...
Stage 4:
muckyman Admin
Posts : 6470 Join date : 2009-11-14 Age : 59 Location : Hull UK
Subject: Re: Papa's Quad Build(s). Wed Aug 02, 2017 8:17 am
Looking good there buddy...now get those motors soldered on.
_________________
PapaLazarou quake God
Posts : 403 Join date : 2017-01-11
Subject: Re: Papa's Quad Build(s). Wed Aug 02, 2017 9:14 am
muckyman wrote:
Looking good there buddy...now get those motors soldered on.
Cheers mate,
Yup, got 2 on last night and extended other 2, connect those last 2 later and onto other bits like buzzer, LEDs, receiver etc... Takes a little longer being tidy about it, but weathers bobbins, so no need to rush.
Have to move location of receiver, I had it above the ESCs, they are too close to the lid, so moved that back above the PDB which I'm not keen on but I'm sure it'll be fine. If it's not happy because of being to close to PDB (poss noise issue) then it can move to a few other places, one is next to ESCs, on it's edge, like the ESCs, laying along side them.
Made a small cable for the XSR receiver, bit annoying that I have to go through two ports to get telemetry and SBUS and also have to use the plugs, but it's ok like this as again it makes it accessible. Could have one soldered to UART3, but the other would still have to be a plug, so might as well use both it's neater.
So... UART1 - Can't touch, as it's used for USB. at least I'm sure I could but not use what ever's connected during Cleanflight config. UART3 - SBUS RX pin. UART2 - Telemetry TX pin.
I'm sure they could config UART3 TX pin for output to Tele and UART3 RX pin for input for SBUS, I will look into this, it would mean I could use 4 pins right next to each other. Probably not possible, theoretically, it is, we'll see. For now this will work fine.
Your doing it different then me, I have SBUS via UART2 plug, but not using telemetry. Is it not possible to use a single UART port for both telemetry and SBUS? You can solder a wire to the contacts on the backside of a plug, if you don't want to use loose plugs. And maybe put a drop of glue on the plug to fix it properly.
Tip: make a cut-out around the bind button on the receiver, like I did on this pic below. I had my quad drop from the sky once, because the shrinkwrap tightened from the heat generated by the components, causing the bind button to be pushed in constantly.
Hehe, yeh bound it earlier this afternoon, motors now spin correctly after updating ESCs firmware in BLheliSuite yesterday and changing directions of two I got wrong way etc... Created new model on Taranis, changed the fecking AETR channel mapping AGAIN lol, it's so confusing. I have Aileron = Roll etc wrote down on sticky note, why the fuck they don't name it correctly I've no idea, a simple letter next to each would suffice!!! Anyway, yeh, bound, talks to Transmitter properly and got lots of telemetry stuff coming through now. I only had 3 telemetry things before and I thought it came through the SBUS line, but oh no... You do actually get 3 telemetry items through the SBUS as per normal as I didn't realise until I heard the Bard mention it the other day, you need proper telemetry to get the rest of em, all working great now. I actually thought it was some new thing and it only needs SBUS to get it. So yeh, basically it should now fly pretty much...
Quote :
Your doing it different then me, I have SBUS via UART2 plug, but not using telemetry. Is it not possible to use a single UART port for both telemetry and SBUS? You can solder a wire to the contacts on the backside of a plug, if you don't want to use loose plugs. And maybe put a drop of glue on the plug to fix it properly.
I could use those pads for UART2, but indeed no you can't apparently use TX and RX on same port. I know this could theoretically work, but I don't think they've implemented this. I must check, but in Cleanflight you can only select say UART2 for SBUS, then you have to use a different port in the UI say UART2 for Telemetry. It may be possible another way, but the CF GUI does not allow it. There's a way to remap pins in software, although this may only be for ESC etc... I'll look into it, for now it works, and looks pretty good, but it would be good to know if you can use same port for both Tele an SBUS.
Quote :
Tip: make a cut-out around the bind button on the receiver, like I did on this pic below. I had my quad drop from the sky once, because the shrinkwrap tightened from the heat generated by the components, causing the bind button to be pushed in constantly.
Wow that's terrible that that can happen, good job you spotted it, I would never have realised that, thanks for the tip, will do!
Just figuring out now where to put buzzer, simple job, just making it neat, and audible from the outside of the frame. Also the LEDs, not decided exactly what and how yet. I have 2 x 8 RGB addressable LED strips, also the brilliant COB LED from the Nighthawk. I want the COB and bought a tiny 1gram 12vReg just for that, unfortunately it doesn't quite fit, I have 14cm of space, the COB LED + aluminium backing is about 15.5 ish. I've found one that does fit as I love these super bright COBs, I know they take more power, but, meh, get it order on the slow boat... For now I think I'll put the two 8x LEDs side by side along the back, either will look pretty good and I'm not too bothered about controlling them a single colout will be fine, maybe a slight tweek. I found with the Aurora I changed it from displaying modes and the Nightrider Larson effect to just one colour mapped to Throttle, even that's a bit pointless to me TBH especially on that tiny machine. I may try it again with the longer bar I'm trying, see how it goes. Yeh, love to have the COB as it's super bright, but will order one that fits and for now install 16 along back. 16... Overkill.. .yeh but meh, feck it...
Plus because of the tight fit for the motors the balancing tape I put on one of them is just about catching as it spins, arse! Easy fix though, that particular one was balanced with 4 pieces of tape on top of each other. I'll re-balance it using more side by side than on top of each other, but if that's where the weights needed it's a bit tricky, again easy to do, hopefull I can balance without too much overlap, just need to be super accurate.
EDIT: also just realised...
If I can't use the same UART as such ie UART3 for SBUS and TELE, it would be a bit neater and free up UART2 if I can use a soft-serial option that's on the same plug as the SBUS UART3, then both are on one plug...
We shall see.
CANNER Moderator
Posts : 7123 Join date : 2013-04-30
Subject: Re: Papa's Quad Build(s). Fri Aug 04, 2017 11:39 am
Quote :
Plus because of the tight fit for the motors the balancing tape I put on one of them is just about catching as it spins, arse! Easy fix though, that particular one was balanced with 4 pieces of tape on top of each other. I'll re-balance it using more side by side than on top of each other, but if that's where the weights needed it's a bit tricky, again easy to do, hopefull I can balance without too much overlap, just need to be super accurate.
Please forget the tape, and take it off. I'm sure it will fly great without. I can already tell it will come loose, if only because the motors warm up, melting the tape's glue. If it comes loose during flight it can jam/block the motor. The flightcontroller will compensate for any small imbalance. If the imbalance is so great that you still notice vibrations during flight, and if a bad motor is the cause, you should replace or repair the motor.












 ing time !
ing time !